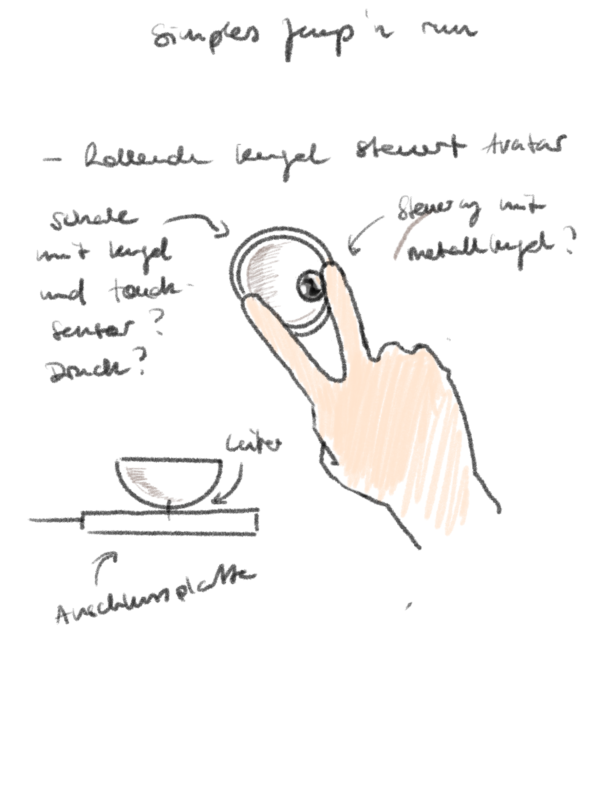
Die Idee ist eine Art Balanceboard für die Finger zu bauen, welches ein kleines Jump ’n‘ Run steuern kann.
Das „Board“ soll die Form einer Schale haben und über einen Leiter locker mit einer kleinen Basis verbunden sein, die als Anschluss an den Computer dient. Falls das Ganze ohne Basis umgesetzt werden kann, wird das natürlich gemacht.
Material und Notlösung
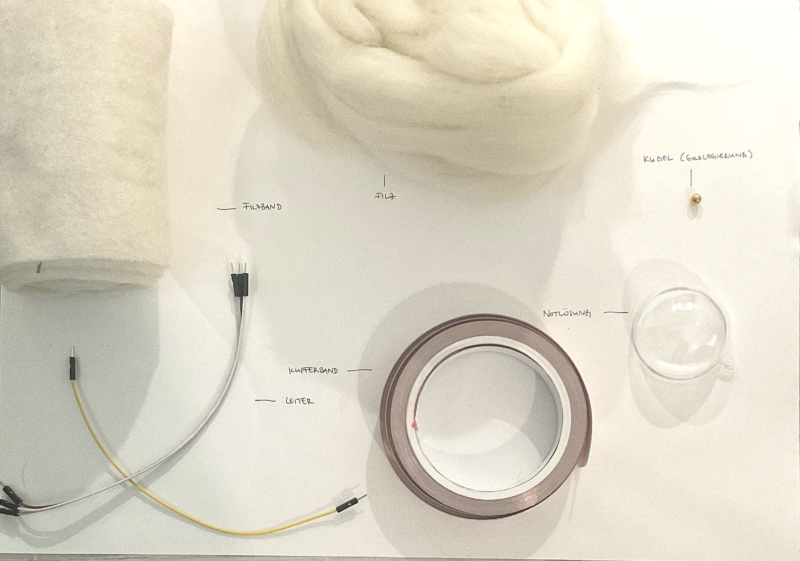
Ursprünglich war angedacht den „Unterbau“ zu filzen und die Leitungen einzunähen, aber da das semi-optimal gelaufen ist, habe ich als Notlösung eine Plastikkugel und Kupferband besorgt.
Um noch etwas Genähtes einzubauen, habe ich weiterhin überlegt, bestickten Stoff in die Mitte der Plastekugel einzuspannen und die kleine Kugel darauf herumrollen zu lassen, aber ich will erst probieren, ob ich den Prototypen überhaupt noch zum laufen bringe und wie viel Zeit dann über bleibt.
Baustellen:
- Leiter anbringen und Isolieren – Garn oder Kabel? Beides?
- ESP zum laufen bringen (wird von Laptop nicht erkannt)
Nachdem ich dank Franzi endlich das ESP zum laufen gebracht habe (Es war das Kabel), habe ich weiter gemacht. Ganz objektiv betrachtet war löten nicht die beste Idee. 😀
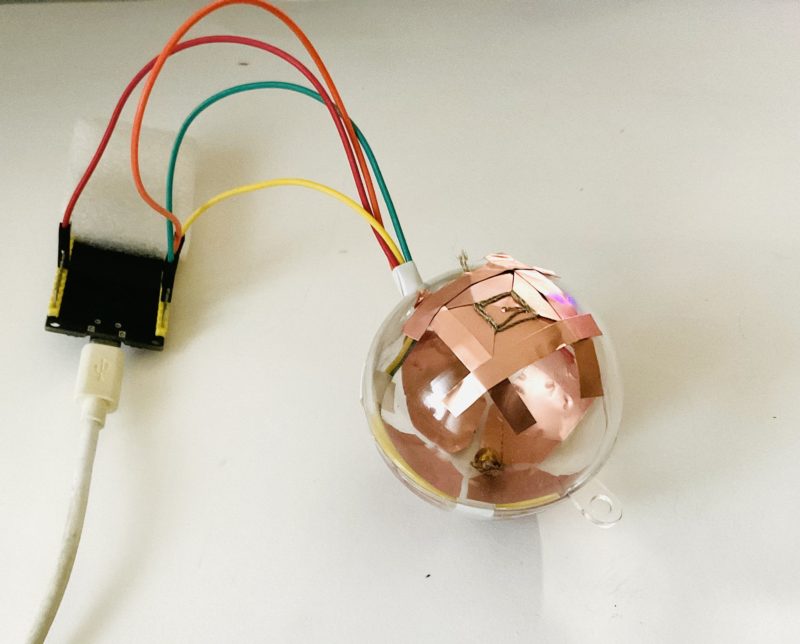
Umsetzung des Controllers
Das Plastik hat sich komplett verzogen, Kupfer leitet Wärme ist notiert.
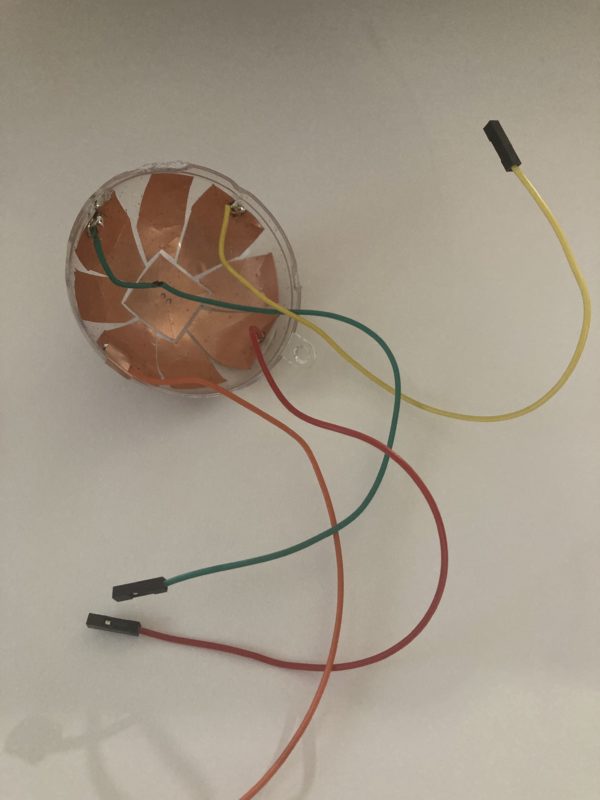

Habe aber glücklicherweise noch eine zweite Kugel gekauft, die jetzt nur mit Kupferband ausgestattet wurde.
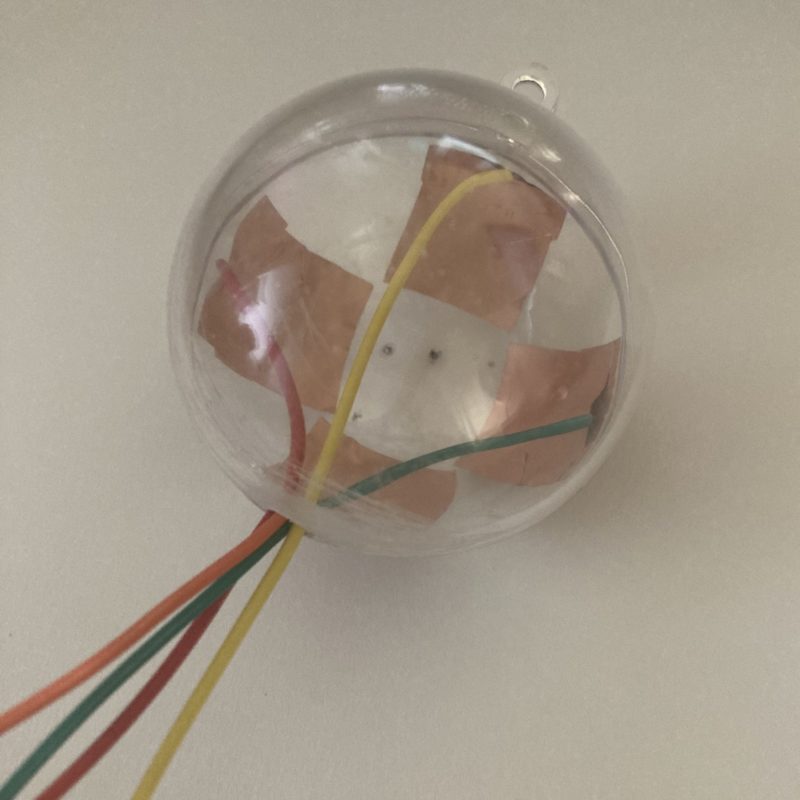
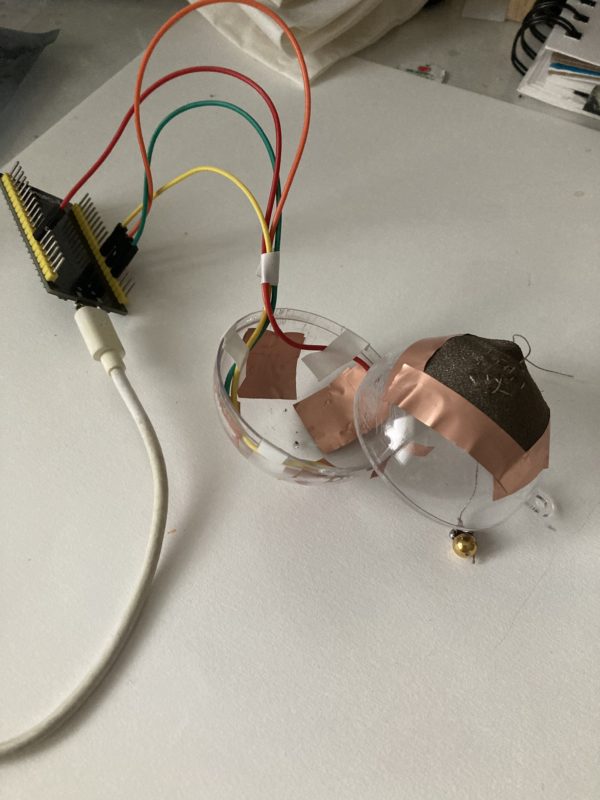
Es hat sich an dieser Stelle leider eine neue Baustelle aufgetan: der ESP erkennt die kleine Metallkugel nicht, ich gehe davon aus, es ist weil sie nicht geladen ist, probiere derzeit noch damit rum.
Aus zeitlichen Gründen gehe ich vermutlich auch von einem Jump’n’run zu einem Walking-Sim über, solange sich da am Ende irgendetwas bewegt habe ich mein Ziel erreicht. 😀
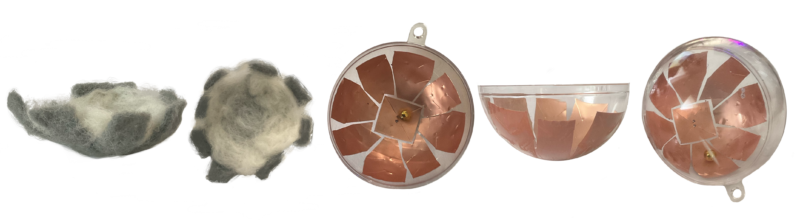
Mit der Metallkugel hat es am Ende tatsächlich nicht geklappt, vermutlich weil sie zu wenig Eigenmasse mitbringt, aber da es funktioniert sobald man sie berührt, also die eigene Ladung überträgt, habe ich leitfähiges Garn daran gelötet und mit der Oberfläche der Plastikkugel verbunden, auf der ich mit Kupferband leitenden Stoff angebracht habe. Es läuft jetzt mehr schlecht als recht, aber es tut sich was.
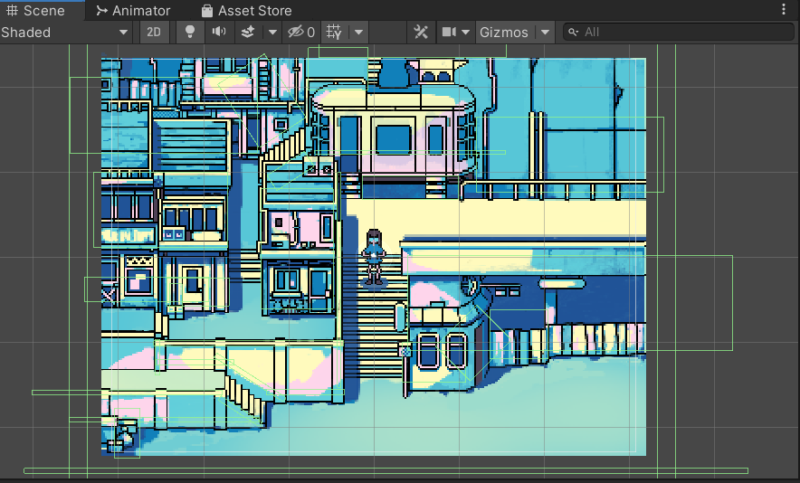
Umsetzung der Anwendung in Unity
Ich habe mich für Grafiken in Pixelart entschieden, weil diese am schnellsten umzusetzen gehen und relativ einfach zu animieren sind. Ich habe mich dann auf ein Format von 320x234px festgelegt und alles in Procreate illustriert und animiert.

Den Code für den ESP habe ich aus dem Blog übernommen und für meine Anwendung angepasst, damit es einigermaßen flüssig läuft. Das Gameformat habe ich als Standalone in 1024x768px angelegt, die Sprites importiert, auf Sorting Layer umverteilt, sodass man hinter den Gebäuden verschwinden kann und alles mit Collidern und für den begehbaren Wagon mit einem Trigger ausgestattet.
Die Player-Controller für Unity sind im Playmaker entstanden. Leider bewegt man sich mit dem leitfähigen Stoff in Verbindung mit dem Garn nur stockend, da es zu Aussetzern bei der Übertragung kommt, ich nehme an es sind Wackelkontakte oder der Stoff leitet zu wenig Ladung.
Außerdem hängt sich die Animation öfter mal auf, vor allem wenn man nach Links laufen will passiert es häufig, das liegt aber an der Art wie ich den Animator aufgesetzt habe und ist erst mal nebensächlich.
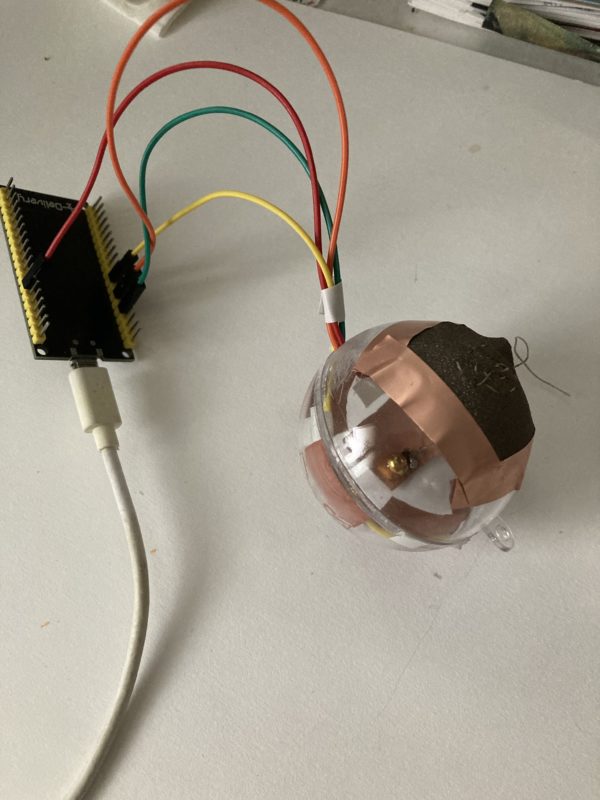
Hier der finale Prototyp, ich habe nochmal mit den mir zur Verfügung stehenden Materialien herumprobiert und bin zu dem Schluss gekommen, dass das Stocken wirklich an Übertragungsproblemen des Stoffes liegt also habe ich ihn durch Kupferband ersetzt. Es stockt immer noch aber läuft jetzt wesentlich flüssiger.